概要
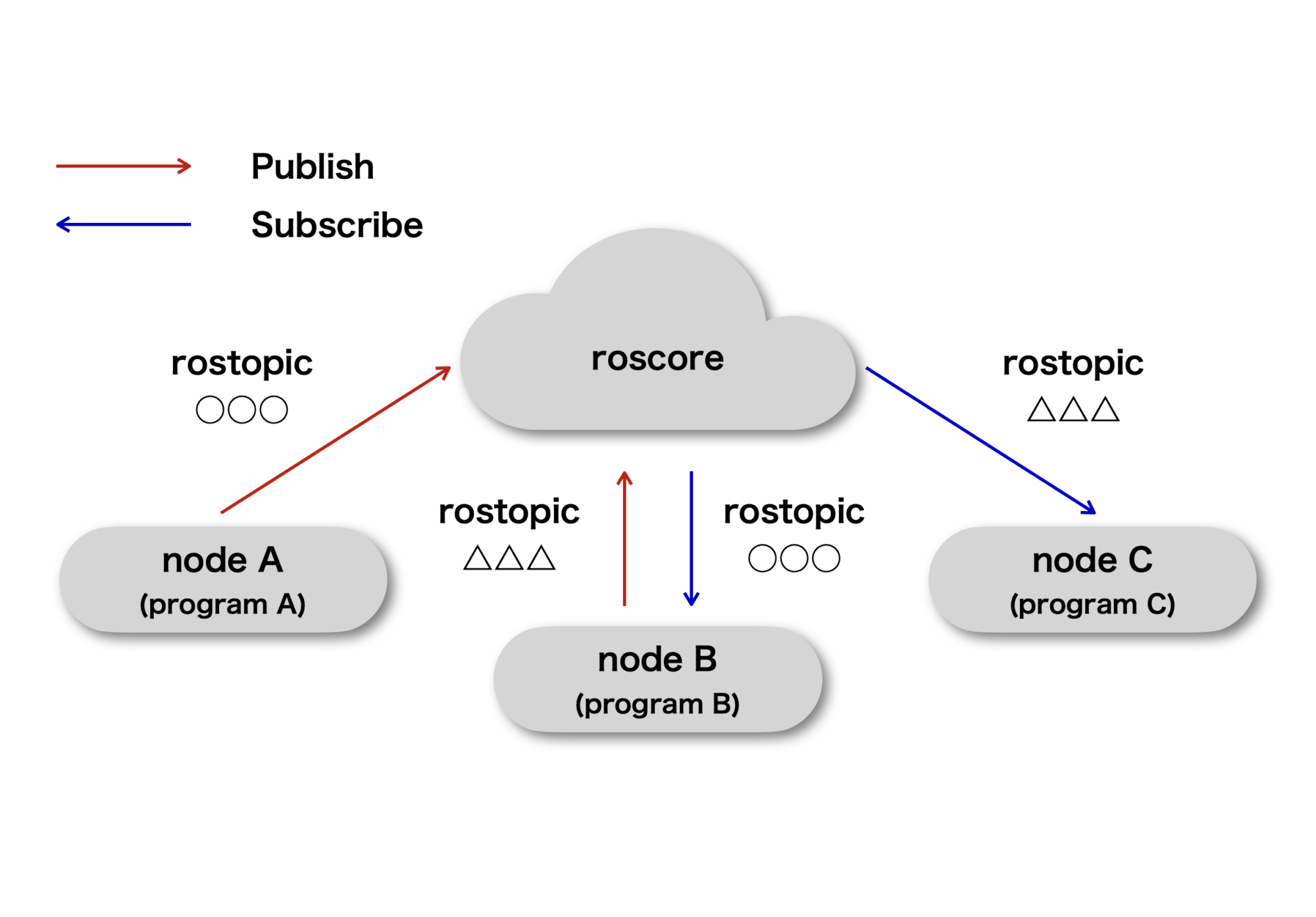
本投稿では、以前に投稿したROSのPub&Sub通信 Python編に続いて、C++によるPublisherとSubscriberの実装方法について解説を行います。Pub&Sub通信に関する説明は前回の記事を参考にしてください。
Pythonによる記述はコンパイル不要で実行が容易である反面、ロボットの制御において、Pythonはプログラムの処理速度が遅いため、C++で記述した方が良い場合があります。そのため、PythonとC++の両方でPub&Sub通信をマスターしておくことが重要です。
実行環境
本記事は、以下の環境で実行しています。
| CPU | Core i7-10875H |
| Ubuntu | 18.04.5 |
| ROS | Melodic |
C++によるPublisherの記述
C++によるPublisherの記述は下記のように行います。
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
int main(int argc, char** argv)
{
ros::init(argc, argv, "publisher_test_cpp");
ros::NodeHandle nh;
ros::Publisher cmd_pub = nh.advertise<geometry_msgs::Twist>("cmd_test", 10);
ros::Rate loop_rate(10);
while (false == ros::isShuttingDown()){
geometry_msgs::Twist cmd;
cmd.linear.x = 3.0;
cmd.angular.z = 0.5;
cmd_pub.publish(cmd);
loop_rate.sleep();
}
return 0;
}Publisherの解説
コードに関して、簡単に解説をします。まずは、1行目でROSのインストールでインストール済みのヘッダファイルをincludeします。2行目の記述は、今回Publishするロボットの速度指令を格納するTwist型をincludeする記述です。その後で、メイン関数の記述を行っています。メイン関数の引数として記載されている int argc, char** argv はコマンドライン引数と呼ばれます。
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
int main(int argc, char** argv)
{
/*
*/
return 0;
}ノード・Publisherの定義
ros::init(argc, argv, "~~~~~~~"); の記述により、ノード名を定義しています。また、NodeHandleの記述により、ノードの名前空間にアクセスができるようになります。Publisherの宣言は、
nh.advertise<Publishしたい変数の型>(”トピック名”, バッファサイズ);
の形で記述をします。ここでは、メイン関数内のwhileループの周期も設定しています。
ros::init(argc, argv, "publisher_test_cpp");
ros::NodeHandle nh;
ros::Publisher cmd_pub = nh.advertise<geometry_msgs::Twist>("cmd_test", 10);
ros::Rate loop_rate(10);whileループ・トピックのPublish
以下の記述で、メイン関数内でwhileループを繰り返します。loop_rate.sleep(); によって、指定した周期で(今回の場合は10Hz)処理が停止されます。C++における変数の定義は、型名 変数名で行います。ここでは、Twist型のcmdという名前の変数を定義して、linear.xとangular.zに値を代入しています。
トピックのPublishには、上で宣言したcmd_pubを使用し、Publisher名.publish(変数名) の形でPublishを実行しています。
while (false == ros::isShuttingDown()){
geometry_msgs::Twist cmd;
cmd.linear.x = 3.0;
cmd.angular.z = 0.5;
cmd_pub.publish(cmd);
loop_rate.sleep();
}Subscriberの記述
次にSubscriber(受け取り側)の記載方法です。
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
void cmd_callback(const geometry_msgs::Twist& msg_cmd){
ROS_INFO("vel_linear_x = %3.2f, vel_angular_z = %3.2f", \
msg_cmd.linear.x, msg_cmd.angular.z);
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "subscriber_test_cpp");
ros::NodeHandle nh;
ros::Subscriber cmd_sub = nh.subscribe("cmd_test", 10, cmd_callback);
ros::spin();
return 0;
}Callback関数の定義
1・2行目に関しては、Publisherと同様です。Publisherとの違いとして、Python編でも述べた通りCallback関数を定義しています。今回の例の場合は、cmd_testというトピックがPublishされる度に、このCallback関数にmsg_cmdとして入ります。C++での記述方法を見ると、C++ 関数の基本を学ぶで解説をした、参照渡しの方法でCallback関数に値を渡していることが分かります。
ここでは、ROS LoggerのROS_INFOを使用して、Subscribeした値を画面出力させています。
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
void cmd_callback(const geometry_msgs::Twist& msg_cmd){
ROS_INFO("vel_linear_x = %3.2f, vel_angular_z = %3.2f", \
msg_cmd.linear.x, msg_cmd.angular.z);
}ノード・Subscriberの定義
下記のメイン関数では、Publisherの場合と同様に、はじめにノード名の定義を行います。Subscriberの定義の仕方は、
nh.Subscribe(”トピック名”, バッファサイズ, Callback関数);
の形で定義をします。これによって、指定したトピックがPublishされると、Callback関数に参照渡しされることとなります。複数のトピックを1つのソース内でSubscribeする場合には、トピックの分だけCallback関数を用意しておく必要があります。ros::spin(); の記述で、トピックがPublishされるとCallback関数にアクセスする処理となります。
int main(int argc, char** argv)
{
ros::init(argc, argv, "subscriber_test_cpp");
ros::NodeHandle nh;
ros::Subscriber cmd_sub = nh.subscribe("cmd_test", 10, cmd_callback);
ros::spin();
return 0;
}ros::spinと ros::spinOnce の違い
上記の例では、Publisherのようにメイン関数内に、whileループを記述していません。Callback関数にアクセスする方法は主に2つあり、下表のような関係となっています。
| 記述方法 | 処理 |
|---|---|
| ros::spin(); | トピックがPublishされるとCallback関数にアクセス |
| ros::spinOnce(); | その行が実行されるとCallback関数にアクセス |
よって、ros::spinOnce();の記述方法を用いる場合には、メイン関数内でwhileループを実行して、その中でCallback関数にアクセスする記述をする必要があります。
CMakeListsの設定
C++の記述では、コンパイルを実行する必要があるため、作成したパッケージディレクトリにあるCMakeLists.txtを下記のように編集します。
cmake_minimum_required(VERSION 3.0.2)
project(simple_local_planner)
## Compile as C++11, supported in ROS Kinetic and newer
# add_compile_options(-std=c++11)
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
tf
)
###########
## Build ##
###########
## Specify additional locations of header files
## Your package locations should be listed before other locations
include_directories(
# include
${catkin_INCLUDE_DIRS}
)
add_executable(publisher_test src/publisher_test.cpp)
add_executable(subscriber_test src/subscriber_test.cpp)
target_link_libraries(publisher_test
${catkin_LIBRARIES}
)
target_link_libraries(subscriber_test
${catkin_LIBRARIES}
)
## Declare a C++ library
# add_library(${PROJECT_NAME}
# src/${PROJECT_NAME}/package_test.cpp
# )
## Add cmake target dependencies of the library
## as an example, code may need to be generated before libraries
## either from message generation or dynamic reconfigure
# add_dependencies(${PROJECT_NAME} ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Declare a C++ executable
## With catkin_make all packages are built within a single CMake context
## The recommended prefix ensures that target names across packages don't collide
# add_executable(${PROJECT_NAME}_node src/package_test_node.cpp)
## Rename C++ executable without prefix
## The above recommended prefix causes long target names, the following renames the
## target back to the shorter version for ease of user use
## e.g. "rosrun someones_pkg node" instead of "rosrun someones_pkg someones_pkg_node"
# set_target_properties(${PROJECT_NAME}_node PROPERTIES OUTPUT_NAME node PREFIX "")
## Add cmake target dependencies of the executable
## same as for the library above
# add_dependencies(${PROJECT_NAME}_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Specify libraries to link a library or executable target against
# target_link_libraries(${PROJECT_NAME}_node
# ${catkin_LIBRARIES}
# )
catkin build
ビルドの方法は、まずTerminalを立ち上げて、下記のコマンドで作成したcatkin_wsに移動し、catkin buildを実行します。
cd catkin_ws
catkin build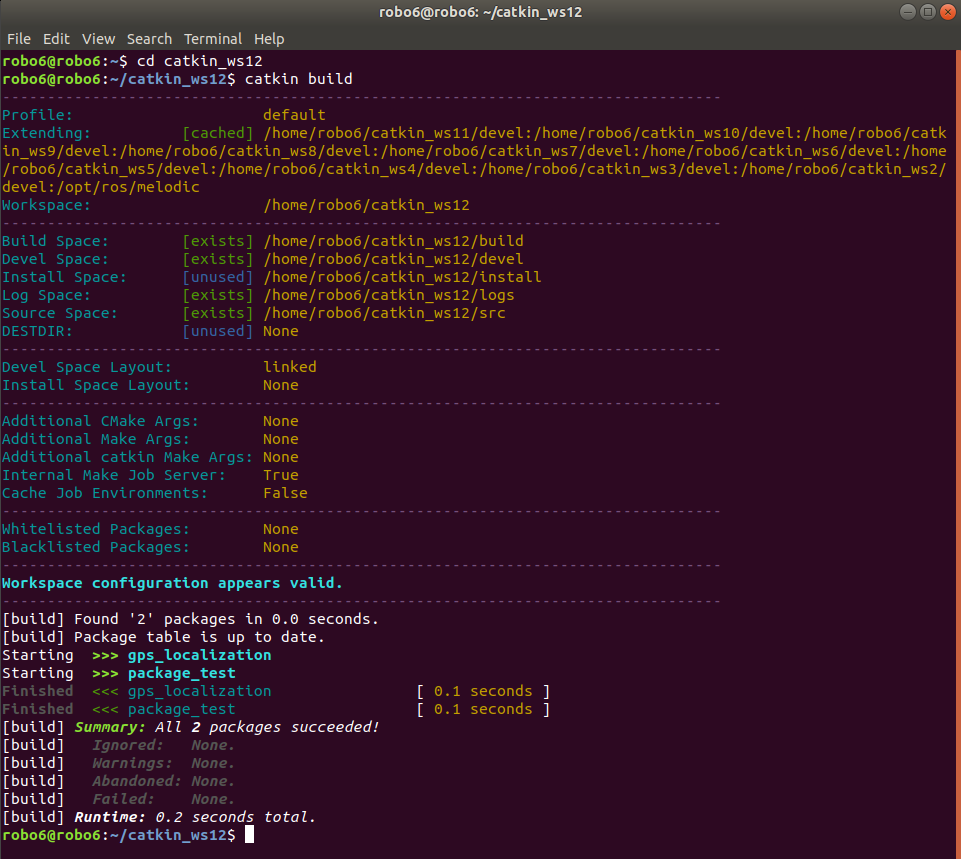
作成したスクリプトを実行する
C++で記述した場合には、Pythonと異なりchmodで実行権限を付与する必要はありません。
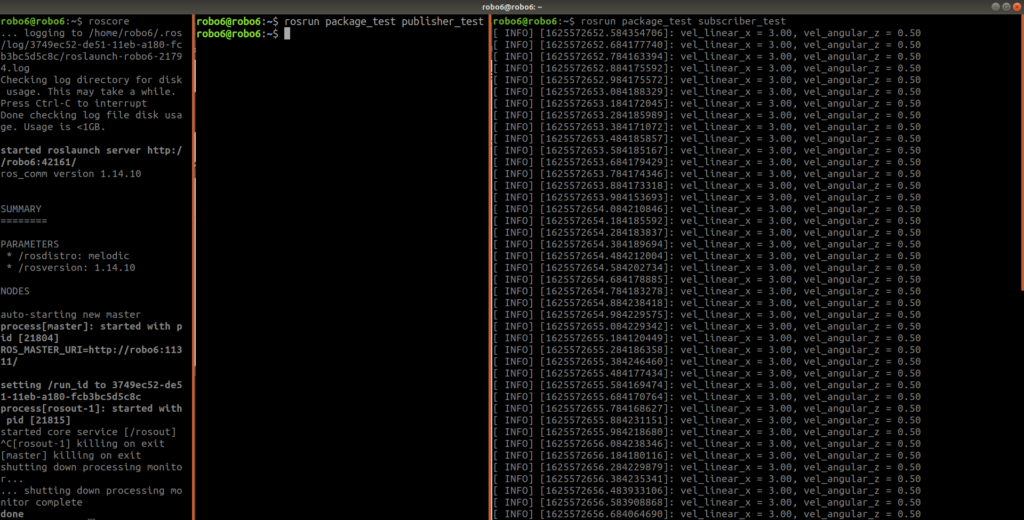
Terminalで実行する
プログラムを実行するには、下の画像のようにTerminalを3つ立上げ、roscore、rosrun packge_test publisher_test、rosrun packge_test subscriber_testの3つを実行します。注意点として、Pythonの場合はスクリプト名の記述で拡張子.pyを記載しましたが、C++の場合には拡張子の記述は必要ありません。
上手く実行出来ていれば、Subscriberで"/cmd_test"の値を確認することが出来ます。
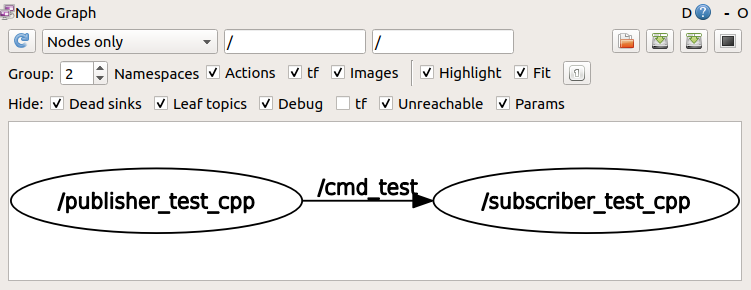
rqt_graphによる確認
Terminalを立ち上げ、rqt_graphを実行することで、立ち上げたノード間でのトピックのやり取りを可視化することができます。
まとめ
本投稿では、Python編に続いて、C++によるPub&Sub通信についてまとめました。
PythonとC++の両方で記述ができるよう、参考にして頂ければ幸いです。