概要
本投稿では、Ubuntu18.04にROS(Robot Operating System)をインストールする手順をまとめます。
ROS Melodicのインストールは、こちらのサイトを参考にしました。
インストール準備
まずはTerminal(端末)を立ち上げて、下記を1行ずつ順番に実行します。
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'sudo apt install -y curlcurl -sSL 'http://keyserver.ubuntu.com/pks/lookup?op=get&search=0xC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654' | sudo apt-key add -ROSのインストール
まず、下記コマンドを入力して、パッケージを更新します。
apt update, apt upgradeに関する説明はこちらの解説が参考になります。
sudo apt update
sudo apt upgrade次に、下記を入力することで、ROS Melodicのインストールが開始されます。
sudo apt install -y ros-melodic-desktop-fullrosdepのインストール
以下のコマンドでrosdepをインストールします。
rosdepはROSの各パッケージの依存関係を処理(確認・更新)してくれるツールです。
GIthub等でソースだけをダウンロードして使用したい場合に、パッケージの依存関係を解決してくれます。
rosdepに関する解説はこちらが参考になります。
sudo apt install python-rosdep
sudo rosdep init
rosdep update注意点として、sudo rosdep initはrosdepインストール時に、一度だけ実行すれば良く、以降は実行する必要はありません。
環境設定
下記のコマンドを実行し、~/.bashrcにROSのコマンドにパスが通るよう追記します。
~/.bashrcは、ターミナル起動時に毎回実行されるスクリプトです。
UbuntuではHomeディレクトリ下に保存されていますが、
隠しファイルのため表示されていない場合にはctrl + hで表示されます。
cd
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrcROSを便利に利用するためのパッケージマネジャーの環境設定をします。
sudo apt install -y python-rosinstall python-rosinstall-generator python-wstool build-essential python-catkin-toolsROSの起動確認
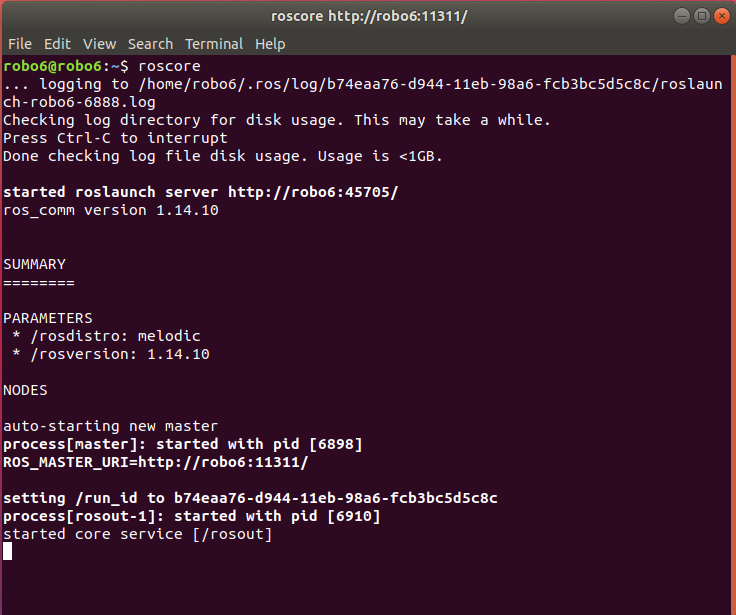
下記コマンドを実行して、エラーが無ければインストール完了です。
roscore特にエラー等が無ければ、下記のようにroscoreが無事立ち上がります。