
概要
ROS(Robot Operating System)では、プログラムをパッケージという単位で管理します。
本投稿では、catkin_ws作成からROSパッケージ作成、ビルドまでを記述します。
実行環境
| 項目 | 環境 |
|---|---|
| OS | Ubuntu.18.04.5 |
| ROS | Melodic |
catkin_wsの作成
ROSに関するソースコードは、ワークスペースの中で記述・ビルドします。
まずはHomeディレクトリ下において、catkin_wsフォルダと、その中にsrcフォルダを作成します。
ワークスペースの名前は何でも良いのですが、ROSではcatkin_wsがよく使われます。
下記コマンドを1行ずつ実行します。
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
cd ..
catkin buildこのままでは、Terminal起動時にcatkin_wsに毎回パスが通らないので、~/.bashrcに設定を追記します。
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrcROSパッケージの作成
下記を実行し、パッケージを作成します。
ROSのパッケージは必ず、catkin_wsのsrcディレクトリ下に置きます。
cd ~/catkin_ws/src
catkin_create_pkg package_test roscpp rospy std_msgs tf 1つ目の引数package_testが作成するパッケージ名、2つ目以降が依存するパッケージです。
ひとまず、上記の4つのパッケージを入力しておけば良いです。こちらは後から編集ができます。
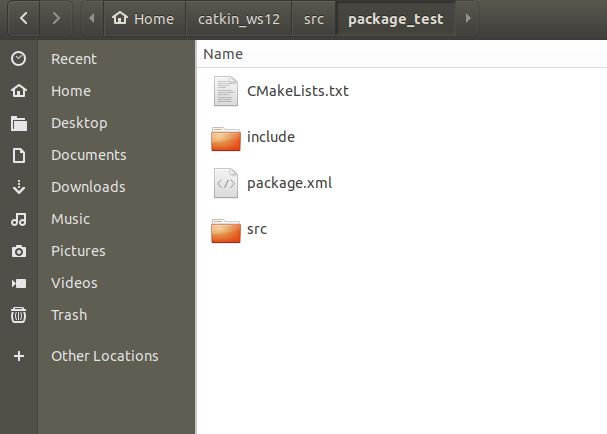
ここまで実行すると、以下のようにpackage_testフォルダ内に、フォルダとテキストファイルが作成されます。
(*画像の場合はcatkin_ws12となっていますが、これまでの手順を実行していればcatkin_wsというフォルダとなります。)
自作のソースコードを記入する場合は、srcフォルダ内に記述していけばよいです。