はじめに
rosbridgeを使用して、ロボットをWeb上でVirtual Joystickによって操作する方法をまとめます。
実行環境
| CPU | Core i7-10875H |
| Ubuntu | 18.04.5 |
| ROS | Melodic |
HTMLファイルの記述
以前インストールしたroswwwとrosbridgeを活用して、Virtual Joystickでロボットを操作するGUIを実装します。
まずは、下記のHTMLファイルをroswwwのディレクトリ内に保存します。roslibjsを活用してcmd_velをPublishしています。
<!DOCTYPE html>
<html>
<head>
<meta charset="utf-8" />
<script type="text/javascript" src="http://static.robotwebtools.org/roslibjs/current/roslib.min.js"></script>
<script type="text/javascript" src="https://cdnjs.cloudflare.com/ajax/libs/nipplejs/0.7.3/nipplejs.js"></script>
<script type="text/javascript" type="text/javascript">
var ros = new ROSLIB.Ros({
url: 'ws://localhost:9090'
});
ros.on('connection', function () {
document.getElementById("status").innerHTML = "Connected";
});
ros.on('error', function (error) {
document.getElementById("status").innerHTML = "Error";
});
ros.on('close', function () {
document.getElementById("status").innerHTML = "Closed";
});
var txt_listener = new ROSLIB.Topic({
ros: ros,
name: '/txt_msg',
messageType: 'std_msgs/String'
});
txt_listener.subscribe(function (m) {
document.getElementById("msg").innerHTML = m.data;
move(1, 0);
});
cmd_vel_listener = new ROSLIB.Topic({
ros: ros,
name: "/cmd_vel",
messageType: 'geometry_msgs/Twist'
});
move = function (linear, angular) {
var twist = new ROSLIB.Message({
linear: {
x: linear,
y: 0,
z: 0
},
angular: {
x: 0,
y: 0,
z: angular
}
});
cmd_vel_listener.publish(twist);
}
createJoystick = function () {
var options = {
zone: document.getElementById('zone_joystick'),
threshold: 0.1,
position: { left: 50 + '%' },
mode: 'static',
size: 150,
color: '#000000',
};
manager = nipplejs.create(options);
linear_speed = 0;
angular_speed = 0;
manager.on('start', function (event, nipple) {
timer = setInterval(function () {
move(linear_speed, angular_speed);
}, 25);
});
manager.on('move', function (event, nipple) {
max_linear = 5.0; // m/s
max_angular = 2.0; // rad/s
max_distance = 75.0; // pixels;
linear_speed = Math.sin(nipple.angle.radian) * max_linear * nipple.distance/max_distance;
angular_speed = -Math.cos(nipple.angle.radian) * max_angular * nipple.distance/max_distance;
});
manager.on('end', function () {
if (timer) {
clearInterval(timer);
}
self.move(0, 0);
});
}
window.onload = function () {
createJoystick();
}
</script>
</head>
<body>
<h1>Simple ROS User Interface</h1>
<p>Connection status: <span id="status"></span></p>
<p>Last message on /txt_msg: <span id="msg"></span></p>
<div id="zone_joystick" style="position: relative;"></div>
</body>
</html>launchファイルの起動
fetch gazeboやmove_base等を起動した後、roswwwパッケージのstart_bridge.launchを起動します。
$ roslaunch roswww start_bridge.launchブラウザから操作する
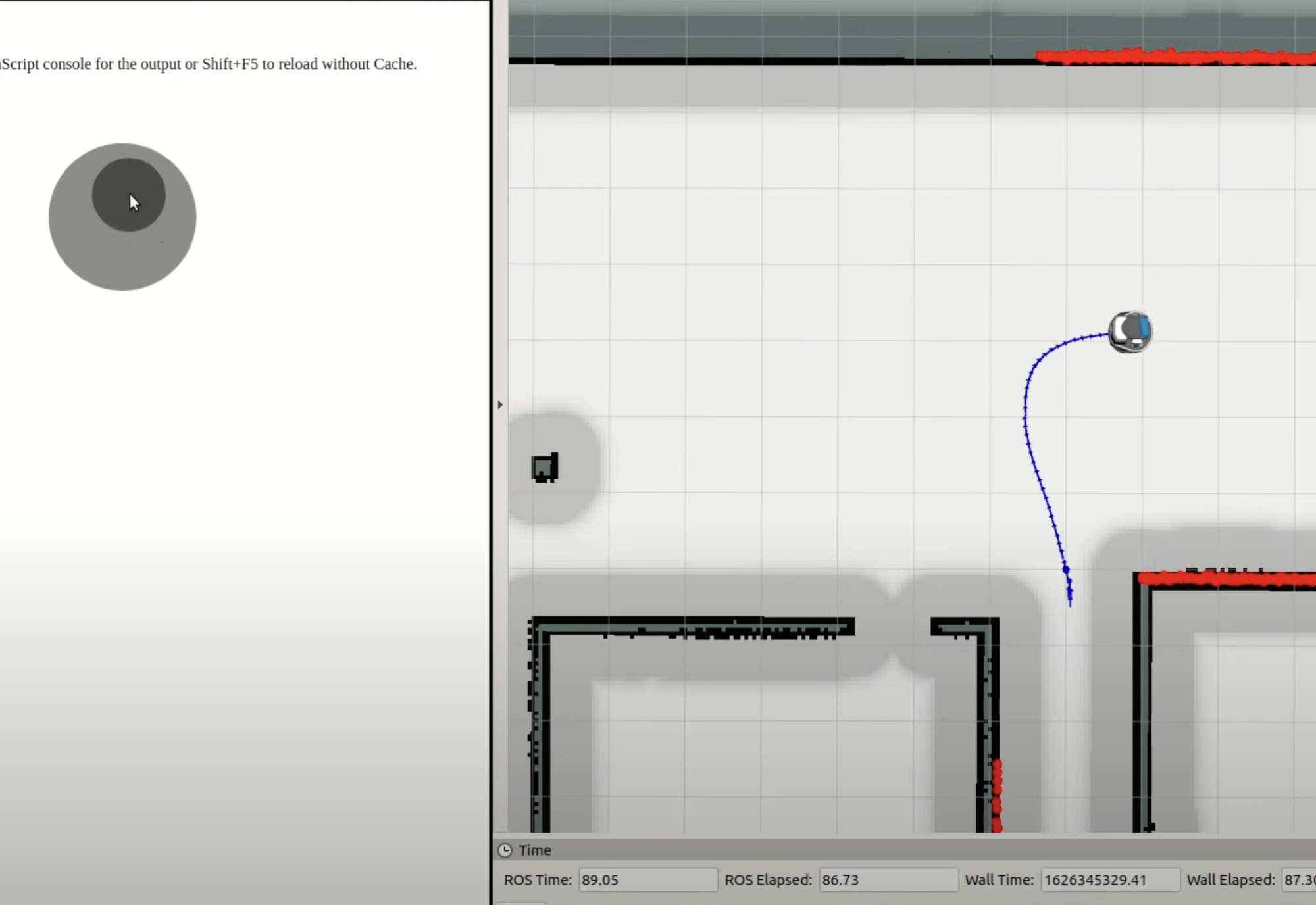
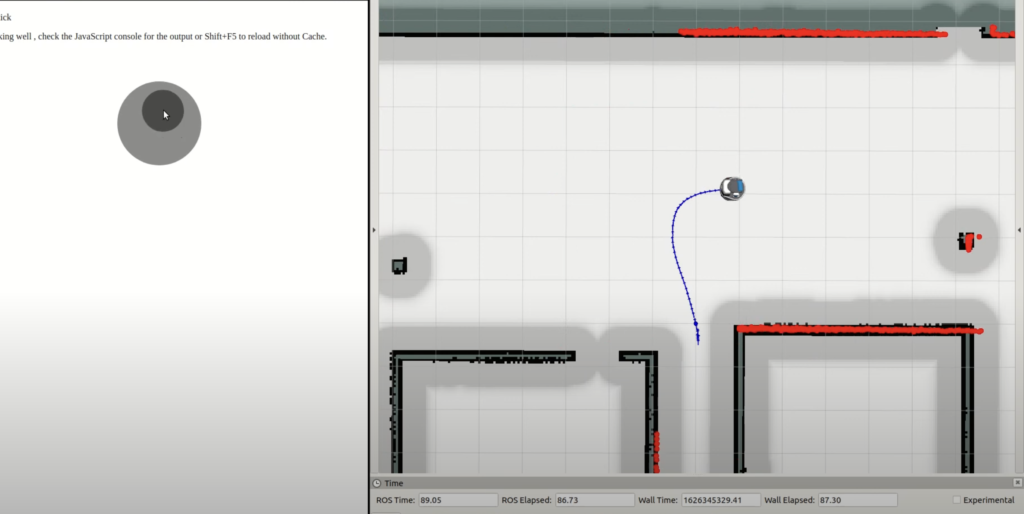
Chrome等のWebブラウザを立ち上げ、http://localhost:8085/roswww/index.htmlにアクセスします。
Joystickでロボットを移動させることが可能です。
他の端末から操作したい場合には、localhost:8085をローカルIPアドレス:9090に置き換えます。